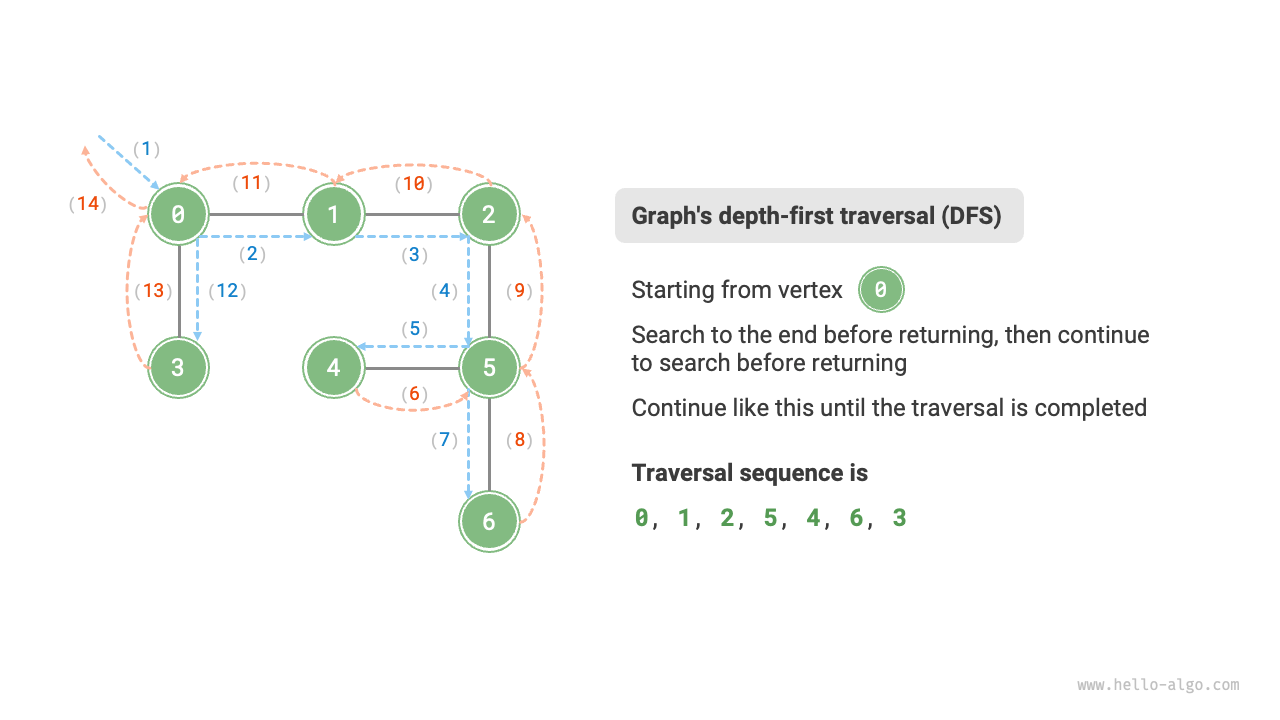
A traversal method that prioritizes going as far as possible and then backtracks when no further path is available.
Visualisation
Efficiency
Time complexity: O(∣V∣+∣E∣) where ∣V∣ is the number of nodes and ∣E∣ is the number of edges. This is because every vertex and every edge would be visited in the worst case scenario.
Space complexity: Maximum number of vertices in output list, and maximum number of vertices in visited list is ∣V∣. Hence using O(∣V∣) space complexity.
Implementation
Python 3 (trees)
import networkx as nxdef depth_first(tree: nx.DiGraph, search_value, value_attr: str = "value") -> list: for node in tree.nodes: if len([i for i in tree.predecessors(node)]) == 0: next = node break if tree.nodes.data(value_attr)[next] == search_value: return [next] return depth_first_recursive(tree, search_value, [next])[1]def depth_first_recursive(tree: nx.DiGraph, search_value, explored: list, value_attr: str = "value") -> bool | list: node = explored[-1] for next in tree.successors(node): print(next, tree.nodes.data(value_attr)[next]) if tree.nodes.data(value_attr)[next] == search_value: return (True, explored + [next]) next_iteration = depth_first_recursive(tree, search_value, explored + [next]) if next_iteration[0] == True: return next_iteration return (False, [])